


产品中心

KT500电力巡检机器人
挂轨机器人利用自身携带的红外热成像仪对室内电力设备温度数据进行采集,然后将采集的数据进行分析,进而诊断出致热型设备故障及热缺陷,触发相应报警。红外测温功能包括红外普测、精确测温、遥控测温和测温预警等。
产品详情
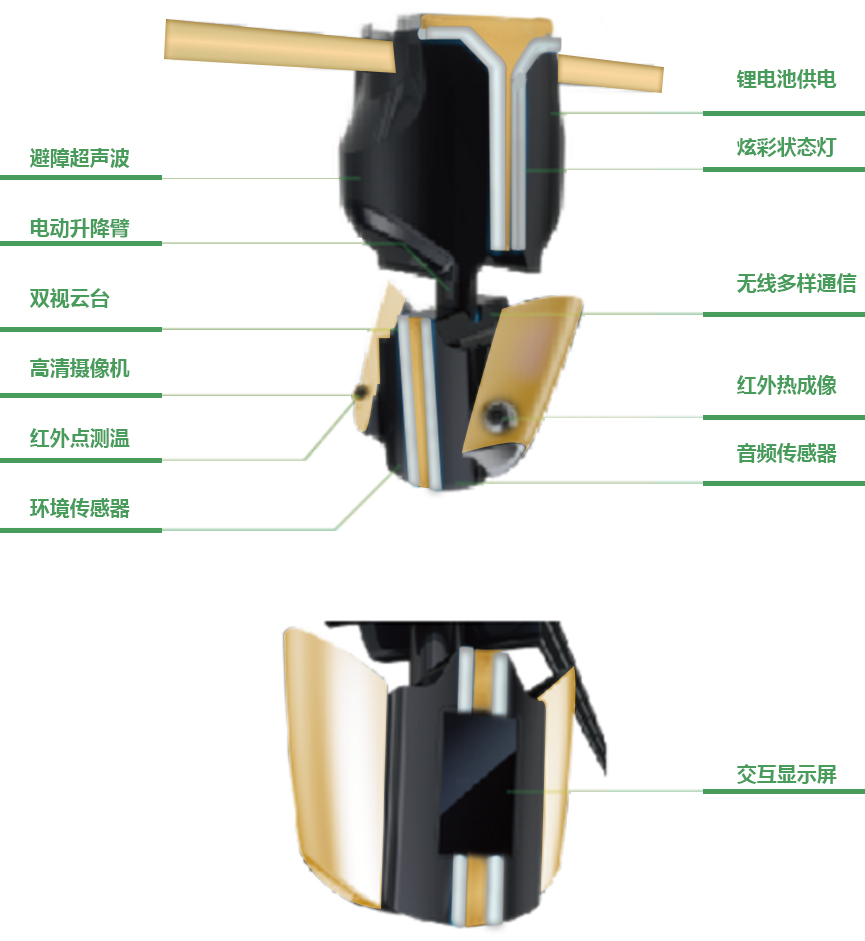
图1-2室内挂轨式巡检机器人结构图
1.1巡检机器人主要功能模块:
| 序号 | 名称 | 描述 |
| 1 | LED补光灯 | 暗环境下可见光视频补光 |
| 2 | 可见光摄像机 | 采集可见光图像 ,支持1080p,30倍变焦 |
| 3 | 防撞雷达 | 检测机器人前后是否存在障碍物 |
| 4 | 热成像仪 | 采集热成像图像 |
| 5 | 环境检测模块 | 环境检测装置,具备检测巡检区域内的有害气体 |
| 6 | 行走机构 | 控制机器人前进后退行走机构 |
| 7 | 升降机构 | 挂轨机器人云台机械结构 |
| 8 | 检测机构 | 单筒型,携带检测设备,支持垂直±90°旋转 |
| 9 | 扬声器 | 前端设备音频输出放大功能 |
| 10 | 交互触摸屏 | 机器人交互控制终端,支持基本控制交互及常规检测结果、报警信息等实时展示 |
| 11 | 状态灯 | 显示机器人不同状态灯光指示 |
| 12 | 云台 | 支持云台水平360°旋转 |
1.2巡检机器人主要性能参数如下所示:
| 类别 | 内容 | 标准配置 | 可选配置 |
| 整机特性 | 外形尺寸 | 400(L)mm×260(W)mm×690(H)mm | |
| 整机重量 | ≤20kg | ||
| 巡检效率 | 10s/巡检点 | ||
| 开关表计识别率 | ≥98% | ||
| 运动性能 | 行走最大速度 | 1m/s | |
| 紧急制动距离 | 0.1m | ||
| 行走定位精度 | ≤±2mm | ||
| 最大升降行程 | 2m | ||
| 最大升降速度 | 0.2m/s | ||
| 升降定位精度 | ≤±2mm | ||
| 运动避障检测 | 3×超声波传感器,检测距离1.5m | ||
| 云台旋转范围 | 水平360º,垂直±150º | ||
| 云台旋转速度 | 60º/s | ||
| 功能模块 | 视频采集 | 200W像素/1080P/自动聚焦 | 200W像素/1080P/自动聚焦/4倍光学变焦 |
| 红外测温 | 红外线测温仪 | 红外热成像仪,分辨率384×288,±0.2ºC | |
| 交互显示 | 7英寸电容触摸屏,分辨率1024*600 | ||
| 环境监测 | 温度-40ºC~+80ºC,温度0.1~99.9%RH | ||
| 局放检测 | / | 超声波+地电波(TEV)+特高频(UHF) | |
| 气体检测 | / | 五合一(O2、CO、 CH4、H2S、SF6) | |
| 供电方式 | 分布式充电桩 | 滑触线全时供电 | |
| 供电单元 | 储能电池 | 24V/16Ah锂电池 | 24V/5Ah UPS后备锂电池 |
| 续航时间 | ≥8h | 全时供电 | |
| 充电时间 | ≤2h(20%-80%) | / | |
| 通信方式 | 有线通信 | / | 200M滑触线电力载波 |
| 无线通信 | Wifi+4G | ||
| 轨道单元 | 转弯半径 | ≥300mm | |
| 轨道类型 | 标准铝合金型材 | ||
| 轨道载荷 | 100kg | ||
1.3 设备清单
| 序号 | 类别 | 名称 | 单位 | 数量 |
| 1 | 通信 | 成套通讯设备 | 套 | 1 |
| 2 | 轨道单元 | 铝型材轨道(直轨) | m | 1 |
| 铝型材轨道(弯轨) | m | 1 | ||
| 支架 | 套 | 1 | ||
| RFID标签 | 个 | 1 | ||
| 3 | 轨道巡检机器人 | T5轨道巡检机器人 | 台 | 1 |
| 4 | 其他 | 电源线 | m | 1 |
| 网线 | m | 1 | ||
| 5 | 备品备件 | RFID标签 | 个 | 1 |
二、系统主要功能
2.1 视频识别
挂轨机器人视频识别是室内挂轨式巡检机器人系统的核心功能之一,通过机器人自身携带的可见光摄像机,完成视频图像的数据采集,通过自主开发的高精度图像识别算法,对视频数据进行智能分析处理,识别视频内容。目前,视频识别功能能够准确识别室内的仪表、压板、开关、指示灯、设备外观等多种表计,并能进行表计自动读数,从而全面掌握站内电力设备及环境的状态信息。
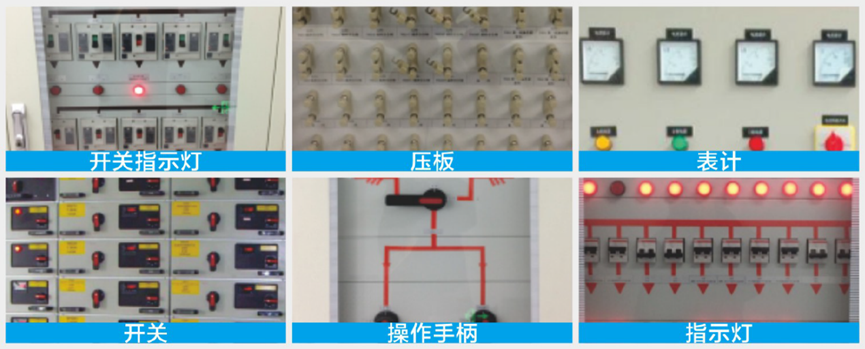
图2-1 表计识别读数
2.2 红外测温
挂轨机器人利用自身携带的红外热成像仪对室内电力设备温度数据进行采集,然后将采集的数据进行分析,进而诊断出致热型设备故障及热缺陷,触发相应报警。红外测温功能包括红外普测、精确测温、遥控测温和测温预警等。
巡检任务执行完成后会自动生成任务报表,对设备温度进行有效的诊断。
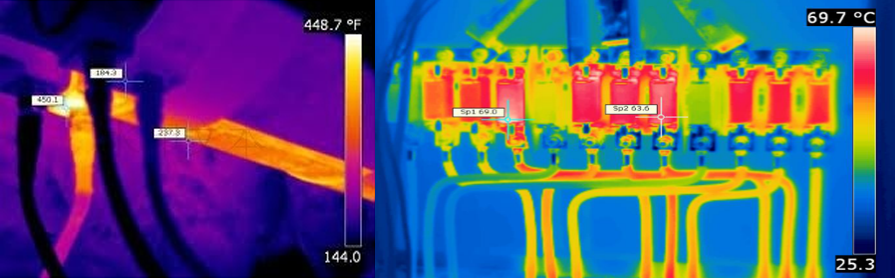
图3-2 红外热像测温图
2.3 环境检测
挂轨机器人能对气体、温度、湿度等环境信息进行实时监控,为运维人员分析设备运行状态提供全方面信息。
挂轨机器人自身携带的环境监测模块,具备监测环境中的有害气体、温度、湿度、烟雾等环境信息。机器人实时采集的环境信息及时传输到控制中心,为操控人员提供现场环境信息,当监测到有害气体超标时,系统将进行报警,以提示运维人员及时处理。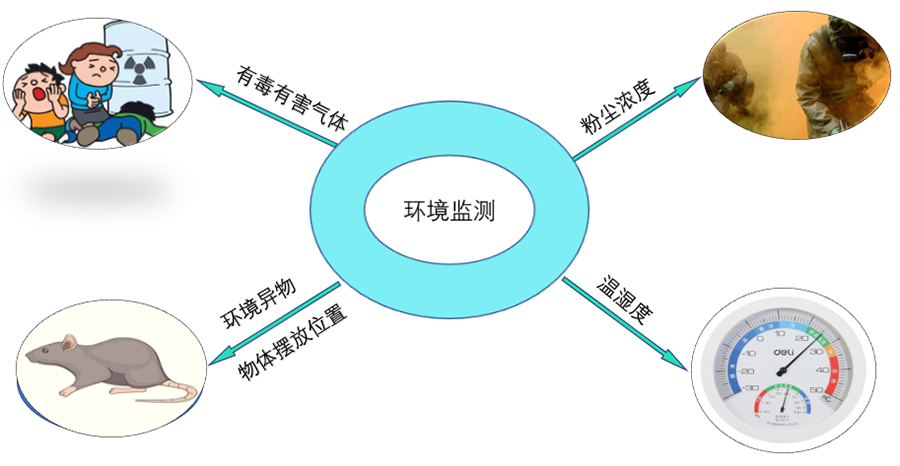
图2-3 红外热像测温图
2.4 音频采集
挂轨机器人本体搭载高灵敏度的拾音器,并随云台一同转动,定向采集电力设备的音频信息。机器人采用国际领先的音频降噪算法和声音识别技术,减轻环境噪音干扰,增强音频信息识别的准确性和可靠性。音频数据经过软件压缩后传回服务器进行存储。
2.5 局放监测(选配)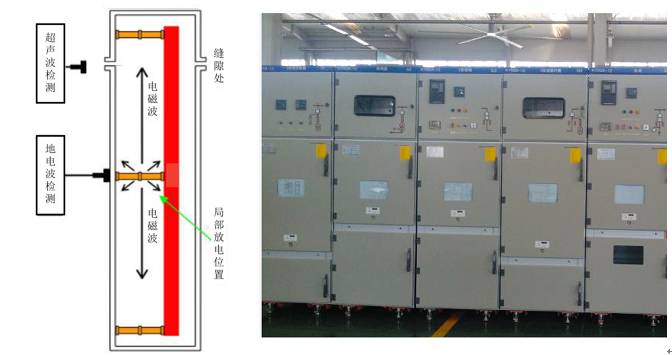
图2-4 局放监测功能
挂轨机器人内部搭载局放监测传感器用于地电波(TEV)和超声波(AE)的检测。当检测到开关柜等设备内局部放电处于异常状态时,能立即触发报警,提示管理人员到达现场处置。利用局放检测设备,能实时对开关柜等设备进行检测。局放检测设备数据模块及控制后台具备局放数据自动绘图、自主识别和诊断的能力,在局放出现异常情况下可以实时报警、应急模式巡检及系统联动功能,同时管理后台能够对单点检测数据进行历史分析,并进行归档和诊断等处理。
2.6 双向语音
挂轨机器人的双向语音功能指的是对讲和广播功能。对讲是指站内工作人员能够在巡检机器人管理后台和机器人之间进行对讲,本功能的实现是通过开启巡检机器人管理后台的语音对讲,同时前方工作人员需打开机器人的语音按钮。广播则可用于管理后台对现场工作远程指挥或紧急情况下要求快速撤离等。

图2-5 语音交互示意图
2.7 任务管理
在监控平台中,将任务管理分成全面巡检、例行巡检、专项巡检、特殊巡检、自定义任务、地图选点以及任务展示等7大模块,每个大模块又拆分为不同的小模块,可以根据各种情况建立不同类型的任务。在任务系统中既可以手动进行任务的执行也可按照日程进行任务分配执行实现自动巡检功能。
2.8 巡检功能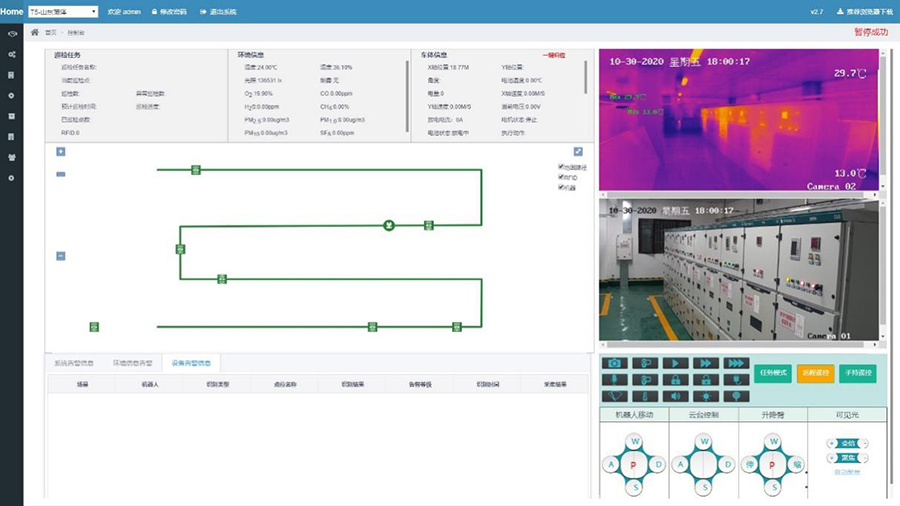
图2-6 后台巡检界面

